HNPM彗诺微量齿轮泵mzr-2521在水下机器人(AUV)的应用
Eichhorn 等人使用德国弗劳恩霍夫(Fraunhofer)应用研究促进协会开发的 CWolf 型 AUV 搭载模块化水质传感器组件对挪威东部渔场附近海域的水质参数进行了实时监测。
作为安装传感器系统的载体平台,使用了弗劳恩霍夫 IOSB-AST 的混合自主水下航行器 CWolf,如下图:
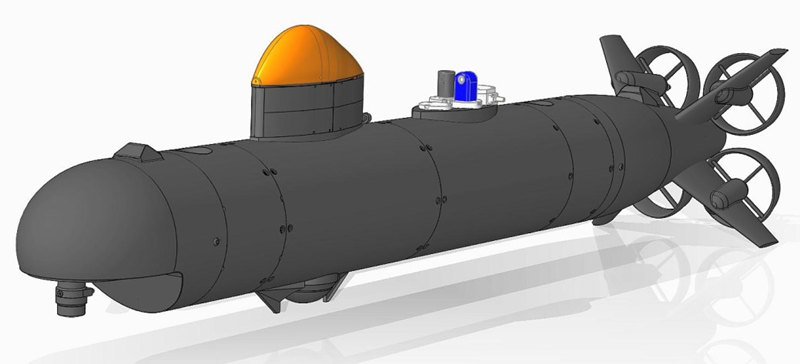
图 1. AUV CWolf.
4H- JENA 工程有限公司(4HJE)(德国耶拿)为有效载荷单元开发并制造了微型传感器系统。下表列出了该系统的主要参数:
| Parameter | Measuring Range/Value |
| Sodium nitrate NaNO3 | 43-2000 μg/L |
| Oxygen concentration O2 | 0-500 μmol/L |
| Conductivity σ | 0-75 ms/cm |
| Temperature T | -5-40 ℃ |
| Measurement cycle | 1 s (O2σ)/ 5-10sNaNO3 |
| Power Supply (Computer) | 12 V |
| Power Supply (Sensors) | 19-25 V |
| Energy Consumption | 12 W (12 V)/10 W (22 V) |
4HJE 在早期的项目中对硝酸盐的光学原位检测进行了广泛的研究,下文将简要介绍光学测量原理和一些技术细节。
所开发的传感器系统集成在与整个水下主体直径相匹配的圆柱形船体中。环形适配器与密封环相结合,实现了与水下主体其他部分的压力密封连接。使用现成的传感器可以方便地从外部进行维护和更换,而无需拆卸部分。此外,还可以在现场操作时更换入口和出口过滤器。
下面呈现了传感器系统的组件和传感器:
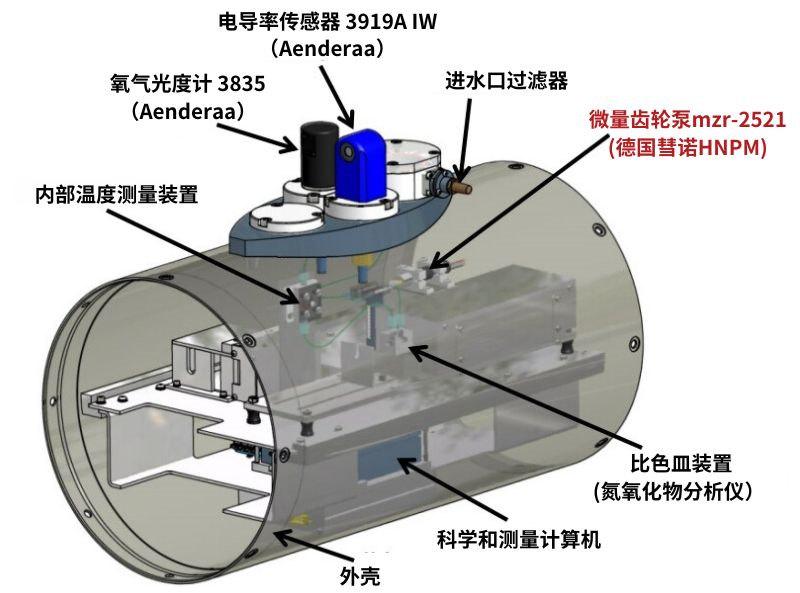
传感器系统的计算机辅助设计(CAD)图(-4H- JENA engineering GmbH-4HJE)
海水分析工艺流程如下:
进水口过滤器 → 微量齿轮泵mzr-2521(德国彗诺HNPM微量泵) → 比色皿装置 → 温度测量 → 带止回阀和过滤器的出水口。科学计算机(SC)和测量计算机(MC)位于该部分的下部。这些计算机通过以太网与车内通信装置连接。由于硝酸盐测量用水必须通过车辆泵送,因此在车体底部安装了泄漏传感器。